| Version 13 (modified by , 15 years ago) ( diff ) |
|---|
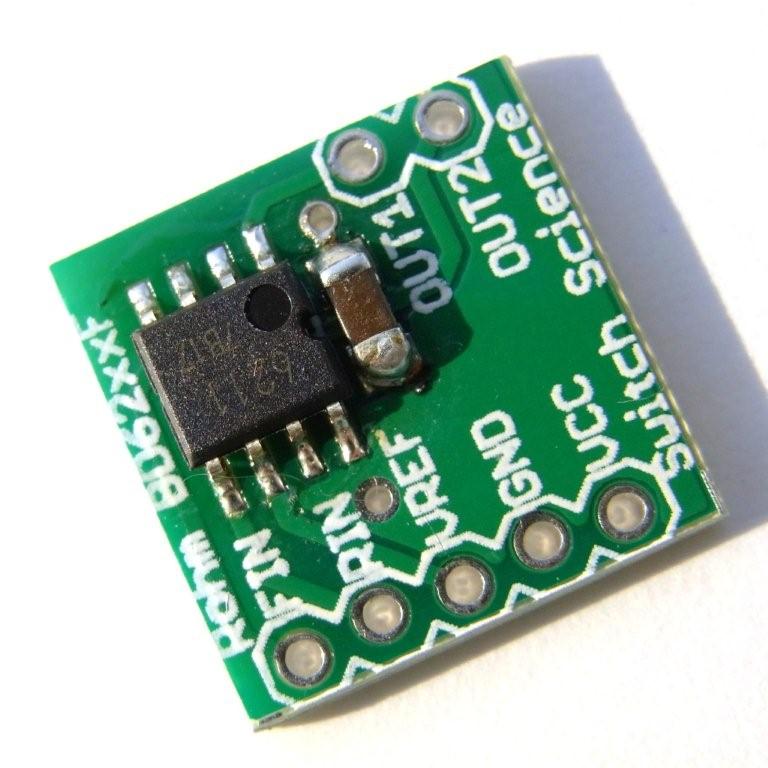
BD62xxFモータードライバ

ロームのBD6211Fを使用した、Hブリッジモジュールです。
- ブラシ付きモーター用
- 正転、逆転、ブレーキ、空走
- 無段階変速。入力はPWMまたはアナログ電圧。
- 電源電圧3~5.5V。
- ドライブ電流最大1A(定格)。
計画からずいぶん時間が経ってしまいました。 実は、基板屋にEagleの.brdファイルで依頼したら、Gerberへの変換ミスでシルクがぐちゃぐちゃになり、作り直してもらったのです。 そんなことがあるとは思いもしませんでした。 製造前にPDFで確認したときは大丈夫だったんですけど。
今回のロットは、なんと手付けです。 そのうち、「なんちゃってリフロー」で製造しますよ!。
良い点:
- 小型
- (たぶん)安い
- ブレーキ、空走機能付き
- 無段階変速(PWMおよびVREFの二通り)
- この大きさで1Aまでドライブできる(定格)
- VREFは内部でPWMに変換して動作しているので、損失=熱が少ない。
- 保護回路いろいろ(過電流、温度、過電圧、低電圧)
悪い点:
- 信号系と負荷系の電源が分離されていない
- 放熱が悪いので、実際には1A連続は厳しいかもしれない。
モーターの定格電圧が信号系(マイコン)の電源電圧よりも低い場合は困ってしまいます。 モーターによっては、PWMで一定のデューティよりも上げないように注意すれば大丈夫な場合があります。
さて、お値段どうしましょう。
使い方
- VCC -- 電源3~5.5Vを接続
- GND -- グラウンド
- OUT1 -- モーター接続端子(出力)
- OUT2 -- モーター接続端子(出力)
ここまでは自明でしょう。
- FIN -- 制御端子(入力)
- RIN -- 制御端子(入力)
- VREF -- 制御端子(入力)出荷時は基板裏側でVCCに接続してあります。
使い方が2種類あります。
- PWM制御方式
-
- FINとRINにPWM信号を与え、回転方向および回転速度を制御する。
- VREFにはVCCを与えておく。出荷時状態なら、VCCに接続してあります。
- VREFアナログ制御方式
-
- FINとRINには論理1または0のデジタル信号を与えて回転方向を制御する。
- VREFに与えたアナログ電圧で、回転速度を制御する。基板裏のJ1のパターンをカッターで切り離して下さい。
PWM制御方式の場合、
| FIN | RIN | 動作 |
| 論理0 | 論理0 | 空転 |
| PWM信号 | 論理0 | 正転 |
| 論理0 | PWM信号 | 逆転 |
| 論理1 | 論理1 | ブレーキ |
PWMの周波数は20kHz~100kHzです。
VREFアナログ制御方式の場合、
| FIN | RIN | 動作 |
| 論理0 | 論理0 | 空転 |
| 論理1 | 論理0 | 正転 |
| 論理0 | 論理1 | 逆転 |
| 論理1 | 論理1 | ブレーキ |
FIN、RINは、電源電圧にかかわらず2V以上で「論理1」です。 このモジュールを5Vで動かしながら、3.3Vのマイコンにつなげることもできます。
スケッチの例
マブチのFA-130を回してみました。
int FIN = 5;
int RIN = 6;
int OFFSET = 1.0 * 256 / 5;
int MAX = 1.5 * 256 / 5 - OFFSET;
int degree = 0;
void setup() {
Serial.begin(9600);
pinMode(FIN, OUTPUT);
pinMode(RIN, OUTPUT);
}
void loop() {
delay(100);
degree += 1;
degree %= 360;
long v = int(sin(degree * 2 * PI / 360) * MAX);
Serial.println(v);
if (v > 0) {
analogWrite(FIN, v + OFFSET);
analogWrite(RIN, 0);
} else
if (v < 0) {
analogWrite(FIN, 0);
analogWrite(RIN, OFFSET - v);
} else {
analogWrite(FIN, 255);
analogWrite(RIN, 255);
}
}
(2009/4/10 - sgk)
Attachments (1)
- 1.jpg (68.6 KB ) - added by 15 years ago.
{kind=link}
Download all attachments as: .zip
Note:
See TracWiki
for help on using the wiki.