| Version 15 (modified by , 9 years ago) ( diff ) |
|---|
Making the direction of super directional speaker remotely adjustable
I made a base with servo motors forthe super directional speaker to make the speaker face different directions.
Some of you may have seen it at our booth during the Maker Faire Tokyo 2014.
We actually brought this speaker to the MFT2013, but it was not clear to the visitors how this speaker was super directional.
Super directional ultrasonic speaker sends the sound only straight out, meaning you can hear the audio only if you are right in front of the speaker. To feel this effect clearly, I made the remote controlled base so that the speaker can face different directions.

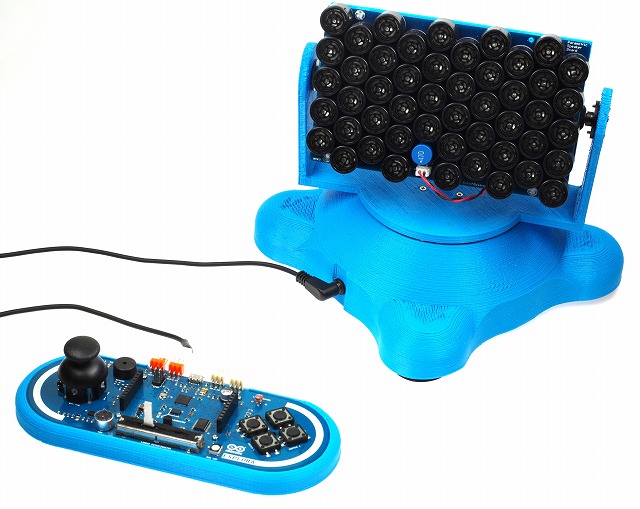
Arduino Esplora is used as console.
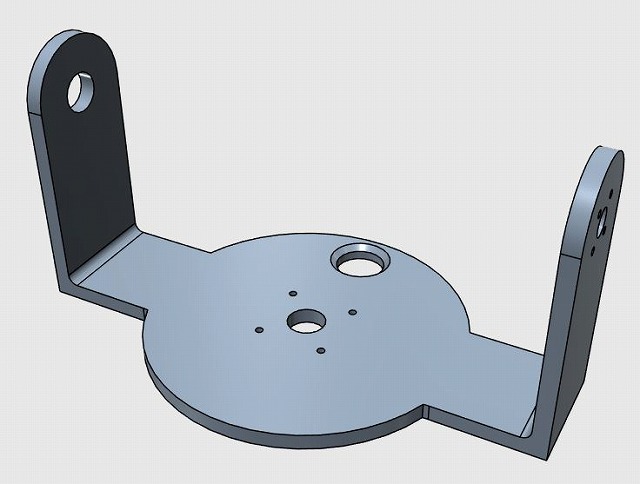
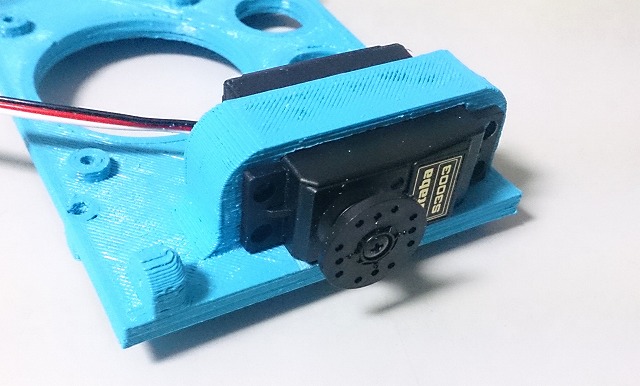
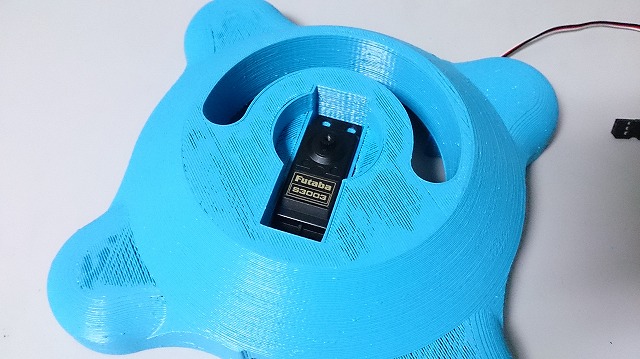
I used 3D printer to make the base to hold the speaker kit in place.


The base exported is in 2 parts and bonded with ABS adhesive.

Attach servo motor (futaba S3003) there.

Then, move on to making of parts to hold the speaker in place.

Attach servo horn and flange bush as shown in the picture below.

CAGs ball and servo horn on the back side.

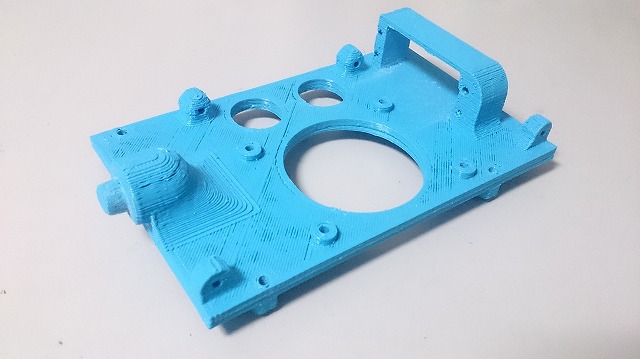
Export the base parts with 3D printer.

Attach servo motor to this part as well, and then assemble the rest of the parts onto it.

When you are done with the assembly, this is how the super directional and direction adjustable speaker should look like.

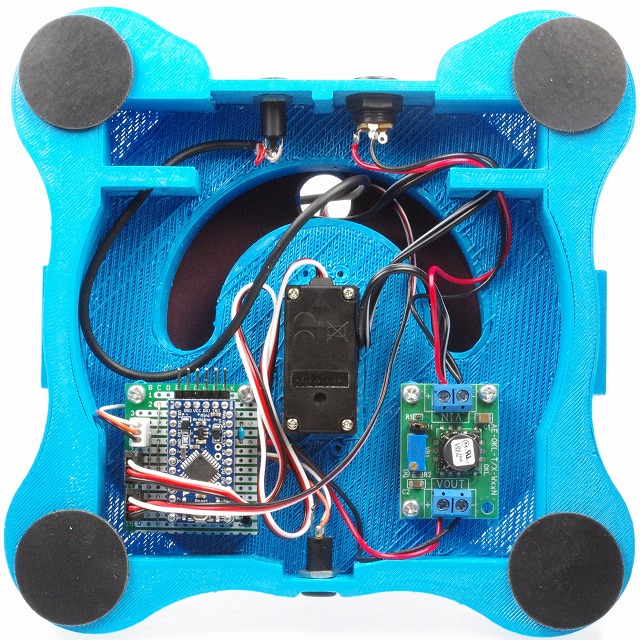
To finish up, join the components in a circuit with wires. From the bottom, it looks like this.

As the supply voltage for the speaker kit is 12V, it needs level shifting power circuit to 5V for control circuit and also Arduino Pro mini for controlling servo motor and communicating with Arduino Esplora.
A lot of visitors were surprised at how the audio sounded by changing the direction of the ultrasonic speaker. And many of them said they needed to actually hear and feel the difference to understand what’s so special about this speaker.
Here you can get the speaker for your extraordinary sound experience.
https://international.switch-science.com/catalog/1842/
sketch
For Arduino Pro Mini
#include <Servo.h>
Servo myservo[2];
char rcvData = 0;
int servo_angle[2];
void setup()
{
myservo[0].attach(3);
myservo[1].attach(7);
Serial.begin(9600);
myservo[0].write(90);
myservo[1].write(90);
}
void loop()
{
servo_angle[0] = 0;
servo_angle[1] = 0;
if(Serial.available() > 0){
rcvData = Serial.read();
if(rcvData == 'x'){
while(!Serial.available()){}
rcvData = Serial.read() - '0';
servo_angle[0] = rcvData * 100;
while(!Serial.available()){}
rcvData = Serial.read() - '0';
servo_angle[0] += rcvData * 10;
while(!Serial.available()){}
rcvData = Serial.read() - '0';
servo_angle[0] += rcvData;
if(servo_angle[0] >= 0 && servo_angle[0] <= 180){
myservo[0].write(servo_angle[0]);
Serial.print("SERVO X ");
Serial.print(servo_angle[0]);
}
}
else if(rcvData == 'y'){
while(!Serial.available()){}
rcvData = Serial.read() - '0';
servo_angle[1] = rcvData * 100;
while(!Serial.available()){}
rcvData = Serial.read() - '0';
servo_angle[1] += rcvData * 10;
while(!Serial.available()){}
rcvData = Serial.read() - '0';
servo_angle[1] += rcvData;
if(servo_angle[1] >= 0 && servo_angle[1] <= 180){
myservo[1].write(servo_angle[1]);
Serial.print("SERVO Y ");
Serial.println(servo_angle[1]);
}
}
}
}
Arduino Esplora用
#include <Esplora.h>
#include <SoftwareSerial.h>
SoftwareSerial mySerial(11,3);
unsigned long x_angle = 90;
unsigned long y_angle = 90;
int x_stick = 90;
int y_stick = 90;
int x_trim = 20;
int y_trim = 0;
double x_temp = 0.0;
double y_temp = 0.0;
int x_stick2 = 90;
int y_stick2 = 90;
int x_demo = 90;
int y_demo = 90;
int add = 1;
int demo_speed = 100;
void setup()
{
Serial.begin(9600);
mySerial.begin(9600);
}
void loop()
{
int i = 0;
int x_axis = Esplora.readAccelerometer(X_AXIS);
int y_axis = Esplora.readAccelerometer(Y_AXIS);
int value = Esplora.readSlider();
int x_joy = Esplora.readJoystickX();
int y_joy = Esplora.readJoystickY();
int uButton = Esplora.readButton(SWITCH_UP);
int dButton = Esplora.readButton(SWITCH_DOWN);
int rButton = Esplora.readButton(SWITCH_RIGHT);
int lButton = Esplora.readButton(SWITCH_LEFT);
if(value > 812){
x_axis = map(x_axis, -180,180,0,180);
y_axis = map(y_axis, -180,180,0,180);
x_angle = (x_angle * 3 + x_axis) / 4;
y_angle = (y_angle * 3 + y_axis) / 4;
Serial.print("x");
if(x_angle < 10){
Serial.print("00");
Serial.print(x_angle);
}
else if(x_angle < 100){
Serial.print("0");
Serial.print(x_angle);
}
else{
Serial.print(x_angle);
}
Serial.print("y");
if(y_angle < 10){
Serial.print("00");
Serial.println(y_angle);
}
else if(y_angle < 100){
Serial.print("0");
Serial.println(y_angle);
}
else{
Serial.println(y_angle);
}
mySerial.print("x");
if(x_angle < 10){
mySerial.print("00");
mySerial.print(x_angle);
}
else if(x_angle < 100){
mySerial.print("0");
mySerial.print(x_angle);
}
else{
mySerial.print(x_angle);
}
mySerial.print(",");
mySerial.print("y");
if(y_angle < 10){
mySerial.print("00");
mySerial.println(y_angle);
}
else if(y_angle < 100){
mySerial.print("0");
mySerial.println(y_angle);
}
else{
mySerial.println(y_angle);
}
mySerial.print(",");
delay(20);
}
else if(value < 212){
x_joy = map(x_joy,-512,511,180,0);
y_joy = map(y_joy,-512,511,180,0);
x_stick = (x_stick * 3 + x_joy)/4;
y_stick = (y_stick * 3 + y_joy)/4;
if(x_stick > 85 && x_stick < 95) x_stick = 90;
if(y_stick > 85 && y_stick < 95) y_stick = 90;
x_temp = x_temp + (x_stick - 90) / 50.0;
y_temp = y_temp + (y_stick - 90) / 50.0;
if((x_temp + 90) >= 180) x_temp = 90.0;
else if((x_temp + 90) <= 0) x_temp = -90.0;
if((y_temp + 90) >= 180) y_temp = 90.0;
else if((y_temp + 90) <= 0) y_temp = -90.0;
x_stick2 = x_temp + 90;
y_stick2 = y_temp + 90;
mySerial.print("x");
Serial.print("x");
if(x_stick2 < 10){
mySerial.print("00");
mySerial.print(x_stick2);
Serial.print("00");
Serial.print(x_stick2);
}
else if(x_stick2 < 100){
mySerial.print("0");
mySerial.print(x_stick2);
Serial.print("0");
Serial.print(x_stick2);
}
else{
mySerial.print(x_stick2);
Serial.print(x_stick2);
}
mySerial.print("y");
Serial.print("y");
if(y_stick2 < 10){
mySerial.print("00");
mySerial.println(y_stick2);
Serial.print("00");
Serial.println(y_stick2);
}
else if(y_stick2 < 100){
mySerial.print("0");
mySerial.println(y_stick2);
Serial.print("0");
Serial.println(y_stick2);
}
else{
mySerial.println(y_stick2);
Serial.println(y_stick2);
}
delay(20);
}
else{
if(x_demo >= 150) add = -1;
else if(x_demo <= 50) add = 1;
x_demo += add;
delay(demo_speed);
if(uButton == LOW){
while(1){
uButton = Esplora.readButton(SWITCH_UP);
if(uButton == HIGH) break;
}
y_demo += 5;
if(y_demo >= 180) y_demo = 180;
}
if(dButton == LOW){
while(1){
dButton = Esplora.readButton(SWITCH_DOWN);
if(dButton == HIGH) break;
}
y_demo -= 5;
if(y_demo <= 0) y_demo = 0;
}
if(rButton == LOW){
while(1){
rButton = Esplora.readButton(SWITCH_RIGHT);
if(rButton == HIGH) break;
}
demo_speed += 10;
if(demo_speed >= 200) demo_speed = 200;
}
if(lButton == LOW){
while(1){
lButton = Esplora.readButton(SWITCH_LEFT);
if(lButton == HIGH) break;
}
demo_speed -= 10;
if(demo_speed <= 20) demo_speed = 20;
}
mySerial.print("x");
Serial.print("x");
if(x_demo < 10){
mySerial.print("00");
mySerial.print(x_demo);
Serial.print("00");
Serial.print(x_demo);
}
else if(x_demo < 100){
mySerial.print("0");
mySerial.print(x_demo);
Serial.print("0");
Serial.print(x_demo);
}
else{
mySerial.print(x_demo);
Serial.print(x_demo);
}
mySerial.print("y");
Serial.print("y");
if(y_demo < 10){
mySerial.print("00");
mySerial.println(y_demo);
Serial.print("00");
Serial.println(y_demo);
}
else if(y_demo < 100){
mySerial.print("0");
mySerial.println(y_demo);
Serial.print("0");
Serial.println(y_demo);
}
else{
mySerial.println(y_demo);
Serial.println(y_demo);
}
delay(20);
}
}
STL file
SD_speaker1.stl SD_speaker2.stl SD_speaker3.stl SD_speaker4.stl
Attachments (12)
- s-SD_speaker.jpg (59.0 KB ) - added by 9 years ago.
- s-SD_speaker2.jpg (69.7 KB ) - added by 9 years ago.
- s-SD_speaker3.jpg (51.5 KB ) - added by 9 years ago.
- s-SDspeaker.jpg (81.4 KB ) - added by 9 years ago.
- s-SDspeaker2.jpg (182.0 KB ) - added by 9 years ago.
- s-DSC_0899.jpg (47.8 KB ) - added by 9 years ago.
- s-DSC_09051.jpg (62.6 KB ) - added by 9 years ago.
- s-DSC_09472.jpg (64.0 KB ) - added by 9 years ago.
- s-DSC_09721.jpg (62.8 KB ) - added by 9 years ago.
- s-DSC_0953.jpg (68.7 KB ) - added by 9 years ago.
- SD_speaker4.jpg (43.3 KB ) - added by 9 years ago.
- SD_speaker5.jpg (127.2 KB ) - added by 9 years ago.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Download all attachments as: .zip