| Version 1 (modified by , 15 years ago) ( diff ) |
|---|
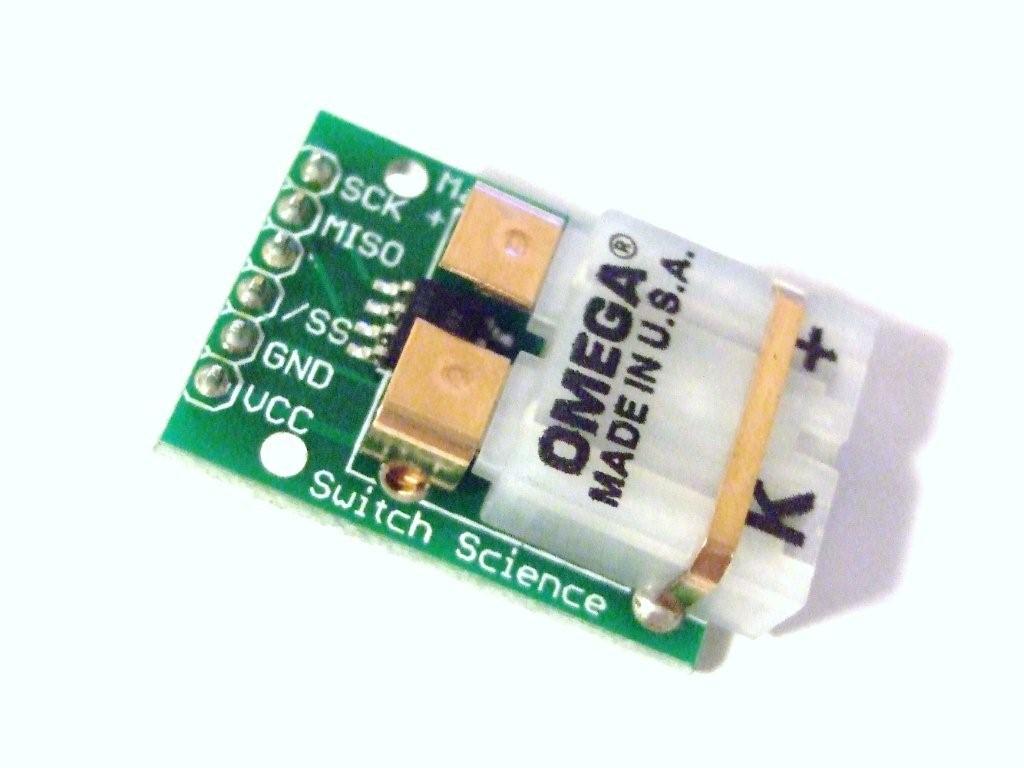
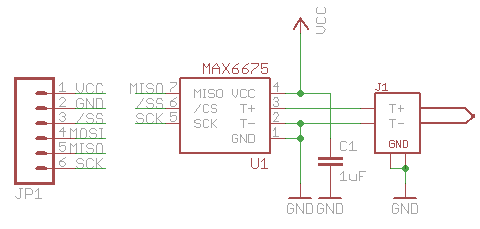
MAX665
MAX6675.pde
#include "SPI.h"
#define VCC 8
#define GND 9
#define SLAVE 10
void
setup()
{
pinMode(GND, OUTPUT);
pinMode(VCC, OUTPUT);
digitalWrite(GND, LOW);
digitalWrite(VCC, HIGH);
Serial.begin(9600);
SPI_Master.begin(SLAVE);
}
void
loop()
{
int value;
delay(500);
SPI_Master.enable(SLAVE);
value = SPI_Master.read() << 8;
value |= SPI_Master.read();
SPI_Master.disable();
if ((value & 0x0004) != 0)
Serial.println("Error");
else
Serial.println((value >> 3) * 0.25);
}
SPI.cpp
#include "SPI.h"
boolean SPI_Master_Class::initialized_ = false;
int SPI_Master_Class::enabled_ = -1;
void
SPI_Master_Class::begin(int slaveselecter) {
if (!initialized_) {
initialized_ = true;
enabled_ = -1;
pinMode(SS, OUTPUT); // Must be set as OUTPUT before SPE is asserted.
pinMode(MOSI, OUTPUT);
pinMode(MISO, INPUT);
digitalWrite(MISO, HIGH); // Pull-up
pinMode(SCK, OUTPUT);
SPCR = (1<<SPE)|(1<<MSTR); // SPE: SPI Enable; MSTR: Master
byte garbage;
garbage = SPSR;
garbage = SPDR;
}
if (slaveselecter != SS)
pinMode(slaveselecter, OUTPUT);
digitalWrite(slaveselecter, HIGH); // Disable
}
void
SPI_Master_Class::enable(int slaveselecter) {
disable();
digitalWrite(slaveselecter, LOW);
enabled_ = slaveselecter;
}
void
SPI_Master_Class::disable() {
if (enabled_ >= 0) {
digitalWrite(enabled_, HIGH);
enabled_ = -1;
}
}
byte
SPI_Master_Class::write_and_read(byte data) const {
SPDR = data;
while (!(SPSR & (1<<SPIF)))
;
return SPDR;
}
void
SPI_Master_Class::write(byte data) const {
write_and_read(data);
}
byte
SPI_Master_Class::read() const {
return write_and_read(0x00);
}
SPI_Master_Class SPI_Master;
SPI.h
#ifndef __SPI_H__
#define __SPI_H__
#include "WProgram.h"
class SPI_Master_Class {
public:
static void begin(int slaveselecter);
void enable(int slaveselecter);
void disable();
byte write_and_read(byte data) const;
void write(byte data) const;
byte read() const;
private:
static boolean initialized_;
static const int SS = 10;
static const int MOSI = 11;
static const int MISO = 12;
static const int SCK = 13;
static int enabled_;
};
extern SPI_Master_Class SPI_Master;
#endif //__SPI_H__
Attachments (3)
- 1.JPG (60.3 KB ) - added by 15 years ago.
- 2.JPG (76.1 KB ) - added by 15 years ago.
- 3.png (3.7 KB ) - added by 11 years ago.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Download all attachments as: .zip
Note:
See TracWiki
for help on using the wiki.